PDF] Assistive humanoid robot MARKO: development of the neck mechanism
![PDF] Assistive humanoid robot MARKO: development of the neck mechanism](https://d3i71xaburhd42.cloudfront.net/e69463ee545ce517305c8f40558f38df795c7341/2-Figure1-1.png)
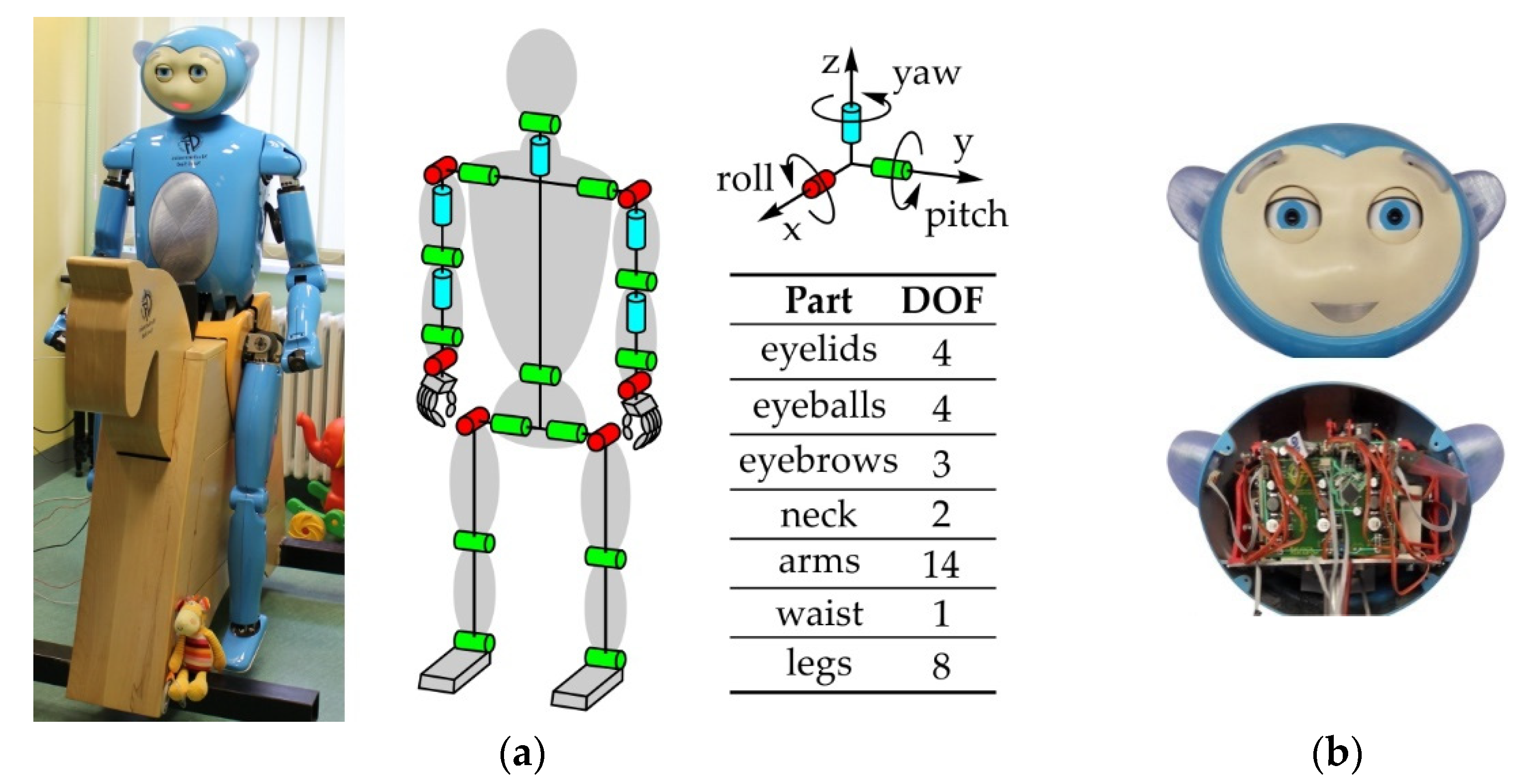
Neck mechanism has high carrying capacity and reliability, high efficiency, low backlash that provide high positioning accuracy and repeatability of movements, compact design and small mass and dimensions. The paper presents the development of neck mechanism for humanoid robots. The research was conducted within the project which is developing a humanoid robot Marko that represents assistive apparatus in the physical therapy for children with cerebral palsy.There are two basic ways for the neck realization of the robots. The first is based on low backlash mechanisms that have high stiffness and the second one based on the viscoelastic elements having variable flexibility. We suggest low backlash differential gear mechanism that requires small actuators. Based on the kinematic-dynamic requirements a dynamic model of the robots upper body is formed. Dynamic simulation for several positions of the robot was performed and the driving torques of neck mechanism are determined.Realized neck has 2 DOFs and enables movements in the direction of flexion-extension 100°, rotation ±90° and the combination of these two movements. It consists of a differential mechanism with three spiral bevel gears of which the two are driving and are identical, and the third one which is driven gear to which the robot head is attached. Power transmission and motion from the actuators to the input links of the differential mechanism is realized with two parallel placed gear mechanisms that are identical.Neck mechanism has high carrying capacity and reliability, high efficiency, low backlash that provide high positioning accuracy and repeatability of movements, compact design and small mass and dimensions.

Robotics, Free Full-Text
PDF) SMA-Driven Soft Robotic Neck: Design, Control and Validation

PDF) The Neck of Pinobo, A Low-Cost Compliant Robot
PDF) Analysis of Mechanisms for Achieving Different Ways of Power

PDF) Design and Simulation of a Human-like Robot Neck Mechanism

Role of Biomedical Technologies in Prosthetics and Orthotics

Soft Robotics Enables Neuroprosthetic Hand Design

Achievements and future directions in self‐reconfigurable modular

PDF) Assistive humanoid robot MARKO: development of the neck

PDF) Assistive Humanoid Robot MARKO: Development of the Neck Mechanism