Sensors, Free Full-Text
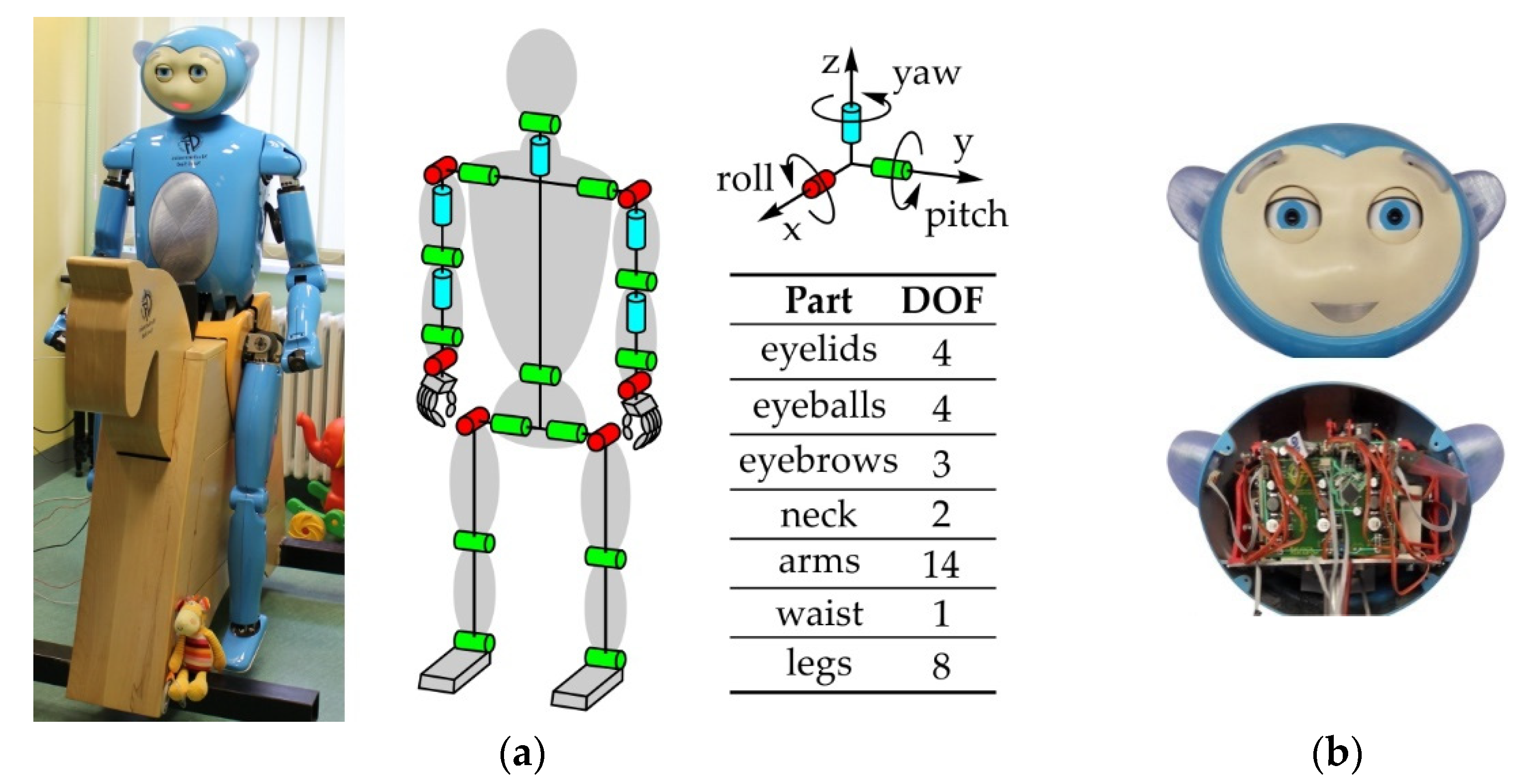
This paper shows the structure of a mechanical system with 9 DOFs for driving robot eyes, as well as the system’s ability to produce facial expressions. It consists of three subsystems which enable the motion of the eyeballs, eyelids, and eyebrows independently to the rest of the face. Due to its structure, the mechanical system of the eyeballs is able to reproduce all of the motions human eyes are capable of, which is an important condition for the realization of binocular function of the artificial robot eyes, as well as stereovision. From a kinematic standpoint, the mechanical systems of the eyeballs, eyelids, and eyebrows are highly capable of generating the movements of the human eye. The structure of a control system is proposed with the goal of realizing the desired motion of the output links of the mechanical systems. The success of the mechanical system is also rated on how well it enables the robot to generate non-verbal emotional content, which is why an experiment was conducted. Due to this, the face of the human-like robot MARKO was used, covered with a face mask to aid in focusing the participants on the eye region. The participants evaluated the efficiency of the robot’s non-verbal communication, with certain emotions achieving a high rate of recognition.
Sensors, Free Full-Text

Sensors, Free Full-Text
Sensors, Free Full-Text, rule 63 urban dictionary

Sensors & Diagnostics journal

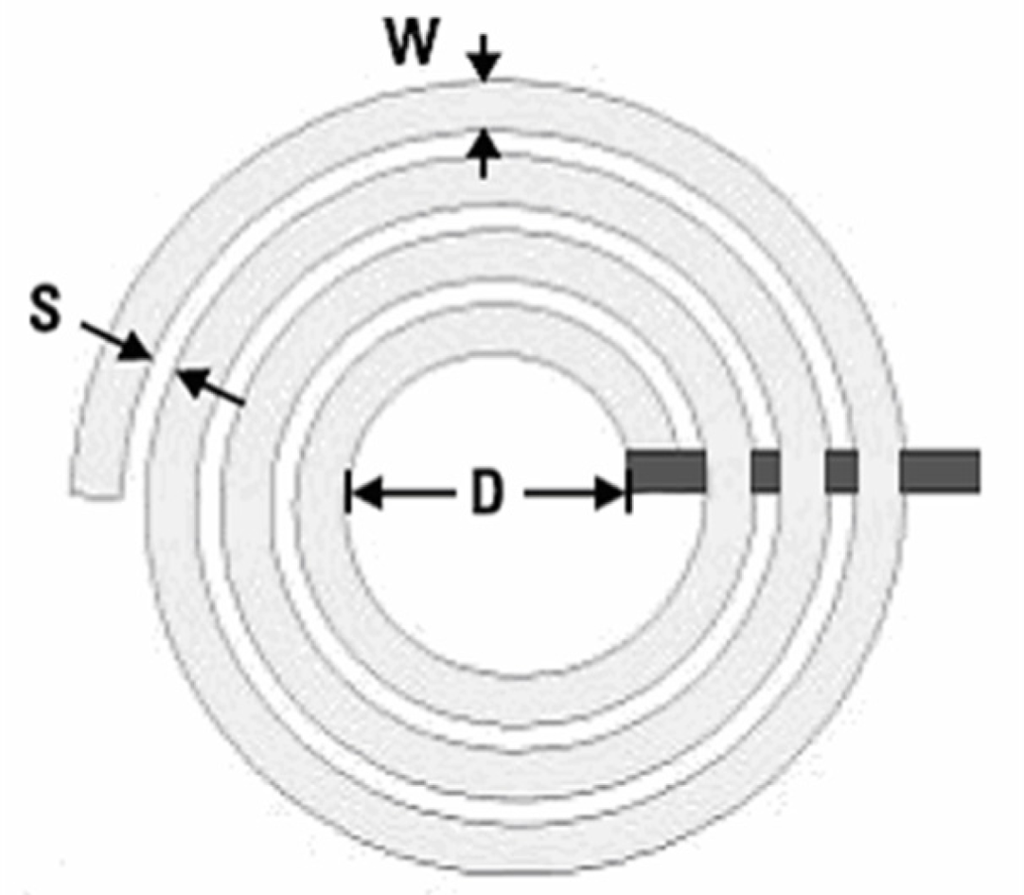
Printable All-Paper Pressure Sensors with High Sensitivity and Wide Sensing Range
Sensors, Free Full-Text

Advanced Sensor Research - Wiley Online Library

Sensors, Free Full-Text, Active Electric Dipole Energy Sources: Transduction via Electric Scalar and Vector Po…
Sensors, Free Full-Text

Sensors for Pressure Mapping and Force Measurement
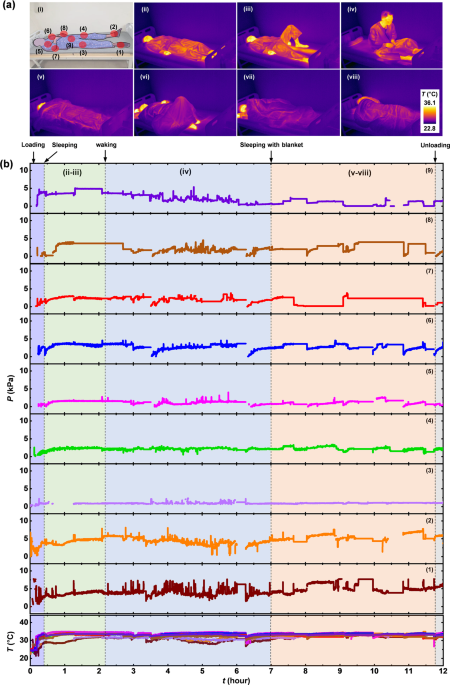
Battery-free, wireless soft sensors for continuous multi-site measurements of pressure and temperature from patients at risk for pressure injuries









