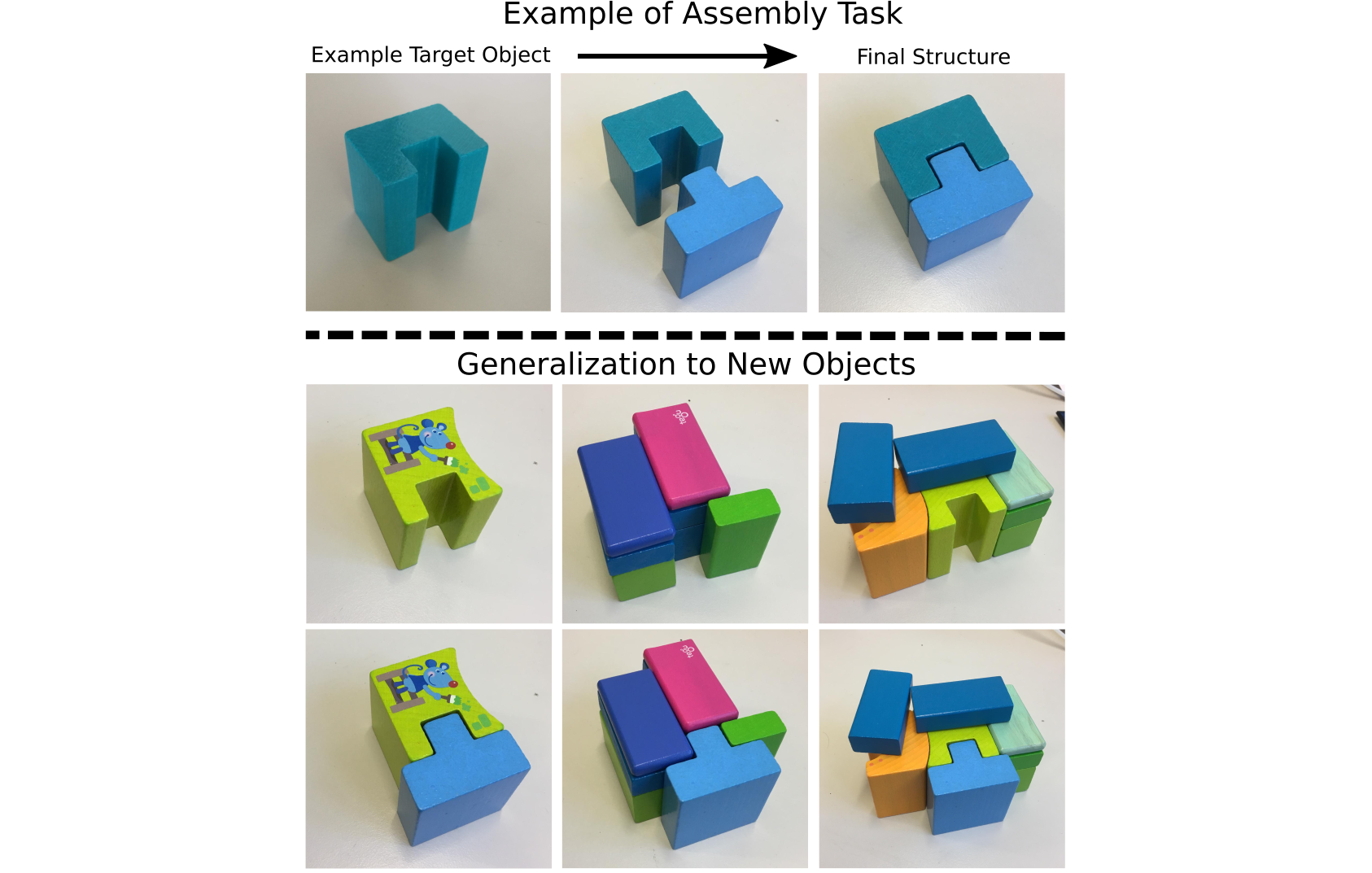
Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation

The framework of the three-stage 6D pose estimation network. (A)

Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review
J. Imaging, Free Full-Text

PDF] Self-supervised 6D Object Pose Estimation for Robot Manipulation
CodaLab - Competition

PDF] Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation
Reconstruction-based 6D pose estimation for robotic assembly

We propose DeepIM, a deep iterative matching network for 6D object pose

Expeditious Object Pose Estimation for Autonomous Robotic Grasping
Frontiers A Manufacturing-Oriented Intelligent Vision System Based on Deep Neural Network for Object Recognition and 6D Pose Estimation

PDF] Sim-to-Real 6D Object Pose Estimation via Iterative Self-training for Robotic Bin-picking
PDF) 6D Pose Estimation of Objects: Recent Technologies and Challenges